
研究概要
【多点探索型最適化手法の構築と解析】
工学では、例えば機器を設計するときの寸法や、機器を動作させるための制御パラメータを適切に選択することが求められます。対象の問題が複雑になるほど、人間の直観や経験に基づく選択は難しくなります。そこで、カオスと呼ばれる簡素な非線形力学が呈する複雑な振る舞いによって、最も優れた「最適解」を探索する新しい最適化手法の研究を行っています。これまでに、カオス力学系によって最適解の探索という複雑な振る舞いが実現でき、かつ、その探索性能が優れていることが実証できました。より高い探索性能や、多様な問題に対応できる頑健さを備えるシンプルな最適化手法の実現を目指して研究を進めています。
【実問題への応用】
最適化手法の構築だけでなく、手法を応用した実問題の解決も行っています。具体的な研究対象には車両伝達系のパラメータ同定や、人間のバランス運動の数理モデリング等があります。
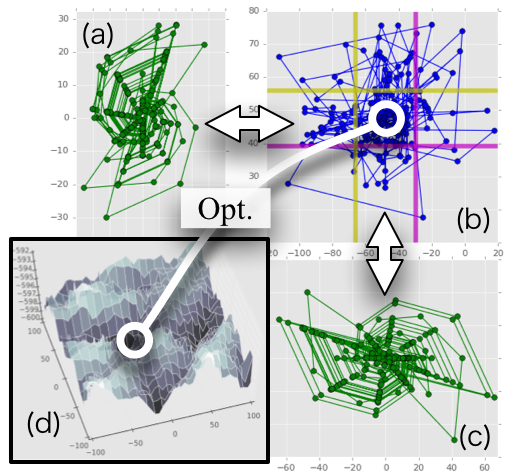
設計したカオス力学系の振る舞い(a, c), これらで実現される探索動作(b)により最適化問題(d)の最適解を探索する.
教育・研究活動の紹介
本研究室では力学システムをキーワードに機械系・電気系・情報系の複合的な分野で研究を行っています。力学システムで生じる現象の解明、数理モデルの導出・同定、所望の動作を実現する最適設計や制御などを、ハードウェアとソフトウェアの両面から研究できることが強みです。
今後の展望
・最適化問題の観点からCAD/CAEにおける数理モデルと実機の合わせこみの自動化
・最適化手法を構築した知見を応用したカオス力学系に基づく移動ロボット群の制御などを行う予定です。ご興味のある企業様等いらっしゃいましたらお声かけください。
社会貢献等
最適設計・最適制御・パラメータ同定等でお困りの際にはお気軽にご相談ください。典型的な問題であれば、汎用的な手法によって解決できる場合があります。
