
研究概要
なるべく小規模なモデル表現で、複雑な現象を高精度にシミュレートする研究をしています。
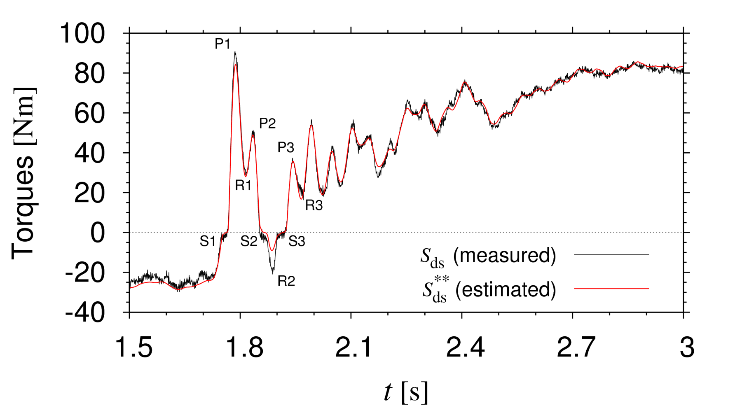
例えば、部品点数が数百を超える乗用車トランスミッションを、わずか数個の要素からなる等価モデルで表し、出力軸トルクを精度95%超で再現することに成功しました。下図はその一例で、黒線が実験データ、赤線がシミュレーションの結果です。
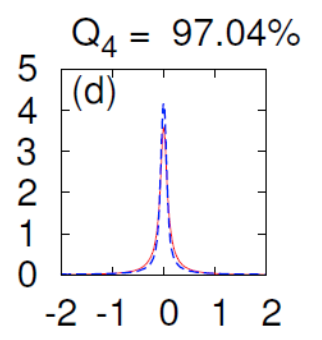
ほぼ同様の方法論により、人間のふらつき動作を高精度にシミュレートすることも可能です。下図の赤線は、ある実験協力者のふらつき振幅の確率密度関数です。これを我々のモデルでシミュレートした結果が、青線になります。ここでも95%を超える精度が得られています。このモデルの規模はわずか4自由度です。
ポイントは、測定データをよく吟味して、対象物の構造そのものではなく、力学的な非線形性を忠実にモデル化することです。もうひとつ重要なのは、モデルパラメータを公称値とせずに、測定データから実際に同定した値とすることです。そのための最適化計算には、いわゆるAI的な手法を駆使します。
教育・研究活動の紹介
3次元CAD/CAE技術の発達により、対象物の構造に忠実なモデルを比較的簡単に作れるようになりました。しかし、それが実験データを忠実に再現する保証はありません。モデルパラメータ数が膨大すぎて、そのほとんどを公称値とせざるを得ないからです。これに対して、当研究室では、あくまで測定データに忠実なモデルを目指します。こうした実証的アプローチが当研究室の特徴であり強みです。
今後の展望
自転車のふらつきをモデル化し、ふらつき振幅をリアルタイム予測する研究に着手しています。
社会貢献等
まだ基礎研究の段階にあるため、現状、技術移転等の具体的計画はありませんが、今後は積極的に取り組んでいきたいと考えています。特に、自動運転AI等への応用などに興味があります。

