研究概要
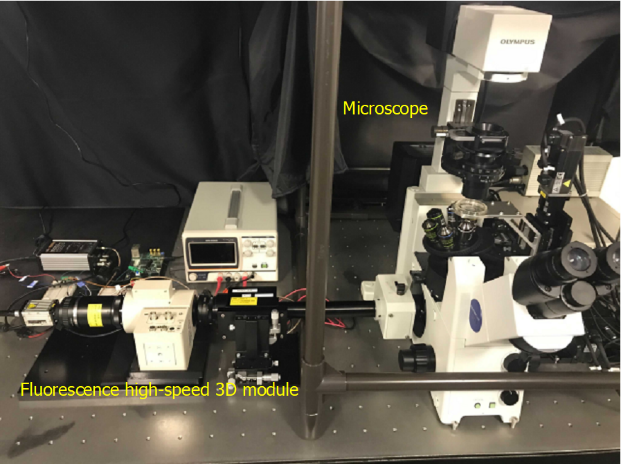
遊泳細胞のように運動する微小物体を顕微鏡で観察する場合、顕微鏡の視野は一般的に狭いため,このような対象を視野内に捉え続きることは困難です。さらに、対象は顕微鏡の視野内だけでなく光軸方向にも移動するため、対象が視野内に存在してもピントを合わせ続けることも難しくなります。これらの問題を解決するためには、微小対象の視野方向と光軸方向の両方について追従できる三次元トラッキングが求められます。三次元トラッキングの実現には対象の三次元計測が必要であり、顕微鏡の視野や被写界深度(ピントが合う光軸方向の範囲)が狭いことを考慮すると、計測にはミリ秒オーダーの高速性が必要となります。本研究では、露光を制御可能な高速カメラと、ナノ秒オーダーで焦点位置を推移可能な可変焦点レンズを組み合わせた高速三次元カメラモジュールを開発し、様々な観察条件に対応させるための検討を行っています。
教育・研究活動の紹介
研究活動としては、広く・深くをモットーに多様性を意識した研究活動を目指しています。専門である画像処理と関連した異分野(生物系・医学系など)にも貢献できる研究を目指しています。これまでの研究では、様々な分野の研究者と共同研究を行い、工学系研究者だからできる異分野に対する技術開発を行ってきました。具体的には、魚類の鳴音解析による魚類の行動を可視化する技術や、顕微鏡のための高速三次元計測技術を開発してきました。研究室での教育活動は、学生との1対1を重視し、研究の進捗・改善点について指導しています。本研究室は医用画像復元が専門ですが、異分野の研究で培った知見による別の切り口でのアドバイスをするよう心掛けています。
今後の展望
顕微鏡の研究で培った可変焦点レンズの制御技術を応用し、眼鏡用の自動焦点調節技術についての検討を予定しています。この技術の確立により、白内障患者や老視鏡使用者のように、眼球内の水晶体による焦点調整能力の低下・喪失した人の助けになる新たな眼鏡を提供できると考えられます。
社会貢献等
電子情報通信学会 ソサイエティ論文誌 査読委員・日本医用画像工学会 編集委員

