
研究概要
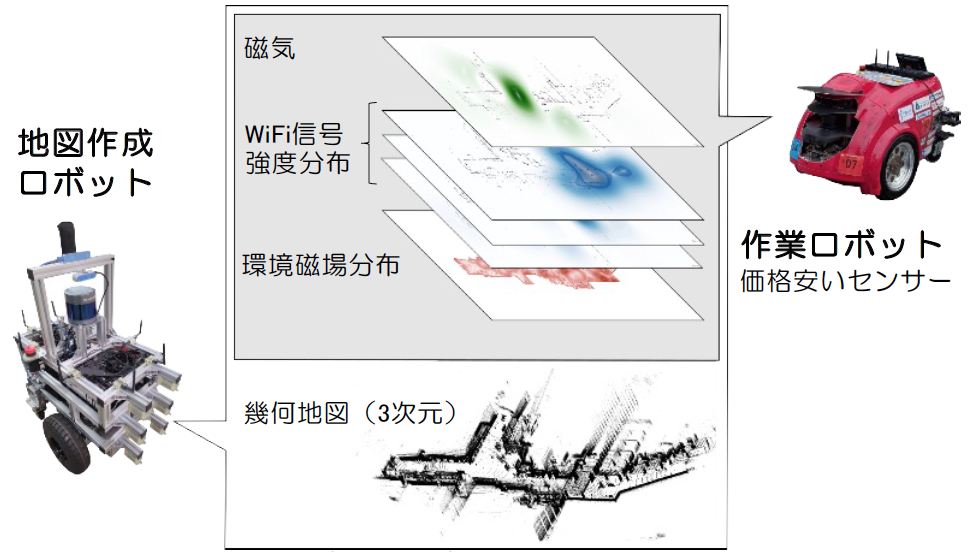
・不可視データの多層化地図よるロボットナビゲーションロボットによる無人搬送など、街中での自律移動ロボットの社会実装が加速されていますが、そのためにはロボットのセンサデータと地図との照合(自己位置推定)が必要です。しかし、人、クルマ、店舗前の看板など、地図データには記載されていない物体の存在で、地図との照合が成立しないことが多々発生しています。そこで、物体の存在に影響されない、目に見えない情報を利用する「不可視情報」の活用を研究しています。
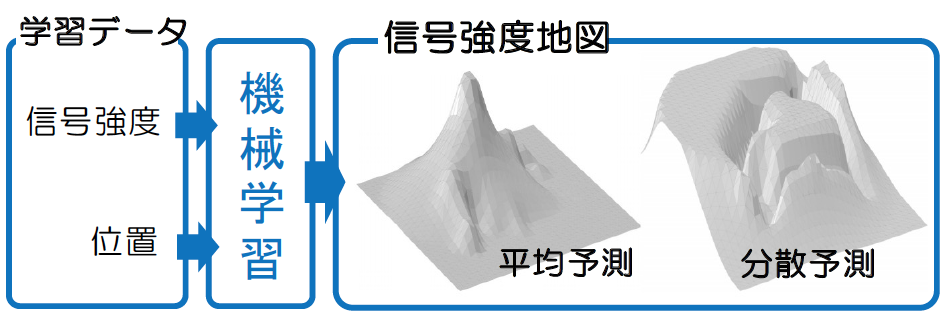
不可視情報とは、一般的なロボットのセンサであるLIDARやカメラなどでは検知できない環境磁気の乱れ(構造物の影響で磁気方位が乱れる)やWi-Fi信号強度変化など場所毎で特徴的に変化する情報を指します。
不可視情報の地図作成ために、機械学習を使用し、一般的な地図と重ね合わせることで、市民生活により地図には表現されない動くモノ、置き場所が変わるモノが多々存在する環境であっても、この情報を使えばロボットの安定した自律移動が実現できます。
教育・研究活動の紹介
学生たちには実装や実機実験を通じて各々の研究テーマに慣れ親しむことが重要だと考えます。このため、当研究室の学生にはロボット実証・実験に参加することが奨励されています。
今後の展望
ロボットは世界を変え、人間の生活をより快適にしています。近年のロボット工学の進歩によって、高齢者ケアから災害対応に至る幅広い範囲でロボットが活用されていることが分かります。しかし、完全な自律ロボットを実社会で使用する場面は未だに少なく、そのような自律ロボットの問題として信頼性と長期間の動作保証が挙げられます。多くのロボットは、実験室においては複雑な作業をしますが、異なる環境で毎日同じ作業をすることは非常に難しいのが現状です。これらの問題を解決するために、今後の研究では、短期的には安定した自己位置推定手法の開発を目指します。安定した自己位置推定手法は様々なシーンでロボットの自律性を実現するために必要不可欠な技術です。また長期的には、ロボットの長時間の使用を保証できるシステムと数学的なツールの研究開発を行い、社会などでも安心してロボットを使えるようにします。
社会貢献等
研究や教育活動の一環として、さまざまな環境でテクノロジーをテストすることに興味があります。 特に人が集まる混雑した場所での社会実装をチャレンジしたいです。なお、不可視情報の活用は特許を出願しています。

